1.RTKとは
RTK(Real-Time Kinematic)は、GNSSから取得した測位データに対し、基準局から送信される補正情報をリアルタイムで適用することで、センチメートル級の測位精度を実現する技術です。
RTKは、GPS・GLONASS・Galileo・BeiDou など複数の衛星測位システムを併用することで、可視衛星数を増やし、測位の安定性を向上させることが可能です。
一般的な単独測位は誤差が ±数メートル(5〜10 m 程度) 発生しますが、RTKを利用することで誤差を大幅に低減できます。
2.RTKの仕組み
RTK測位では、基準局(Base Station) と 移動局端末(Rover) の2種類のGNSS受信機が連携して動作します。基準局は、位置が既に確定している地点に固定設置され、衛星から受信した観測データをもとに補正情報を生成します。一方、移動局端末は測位対象エリアを移動しながらGNSS観測を行い、基準局から送られてくる補正データをリアルタイムで受信します。
概念図では、基準局から移動局端末へ向かう補正情報の伝送を示す線(例:青色の通信ライン)を配置します。移動局端末は、この補正情報を自身の観測値に適用することで、単独測位では得られない高精度な位置計算を実現します。
このように、2局間で観測データと補正情報を組み合わせる仕組みが、RTKによるセンチメートル級の相対測位を可能にしています。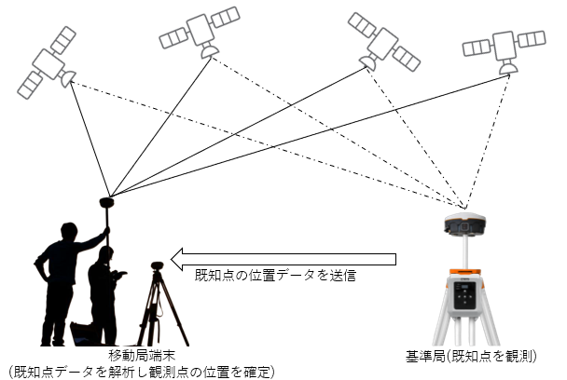
補正データは、以下のいずれかの通信方式で移動局へ送信されます。
- 4G/5G/LTE-M などのセルラー通信
- LoRaWAN などのLPWA
- UHF帯無線(400MHz帯など)
- インターネット経由のNtrip(Networked Transport of RTCM via Internet Protocol)
移動局は、受信した補正情報をもとに、搬送波位相(Carrier Phase)を利用した高精度演算を行います。
搬送波位相測位は、L1/L2/L5帯などの周波数を利用し、波長数ミリメートル単位の位相情報を解析することで高精度化を実現します。
3.活用事例(用途)
RTKは、高精度な位置情報が必要な産業分野で広く利用されています。
- 主な活用事例
- 自動運転・ADAS
車両の走行制御にセンチメートル級の位置精度を利用 - スマート農業(自動操舵トラクター)
直進精度 ±2 cm 程度の自動走行を実現 - ドローン測量(UAV測量)
地上基準点(GCP)を削減し、測量効率を向上 - 建設・土木(ICT施工)
ブルドーザー・ショベルの自動制御に利用 - インフラ点検ロボット
橋梁・トンネルなどの位置管理に活用 - 物流・AGV(無人搬送車)
屋外走行ルートの高精度トラッキング

当社では、RTK用途のアンテナ・モジュール製品も取り扱っています。
詳しくは、製品ページ をご覧ください。